4.1 植被指数直方图特征
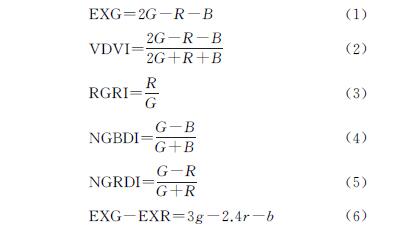
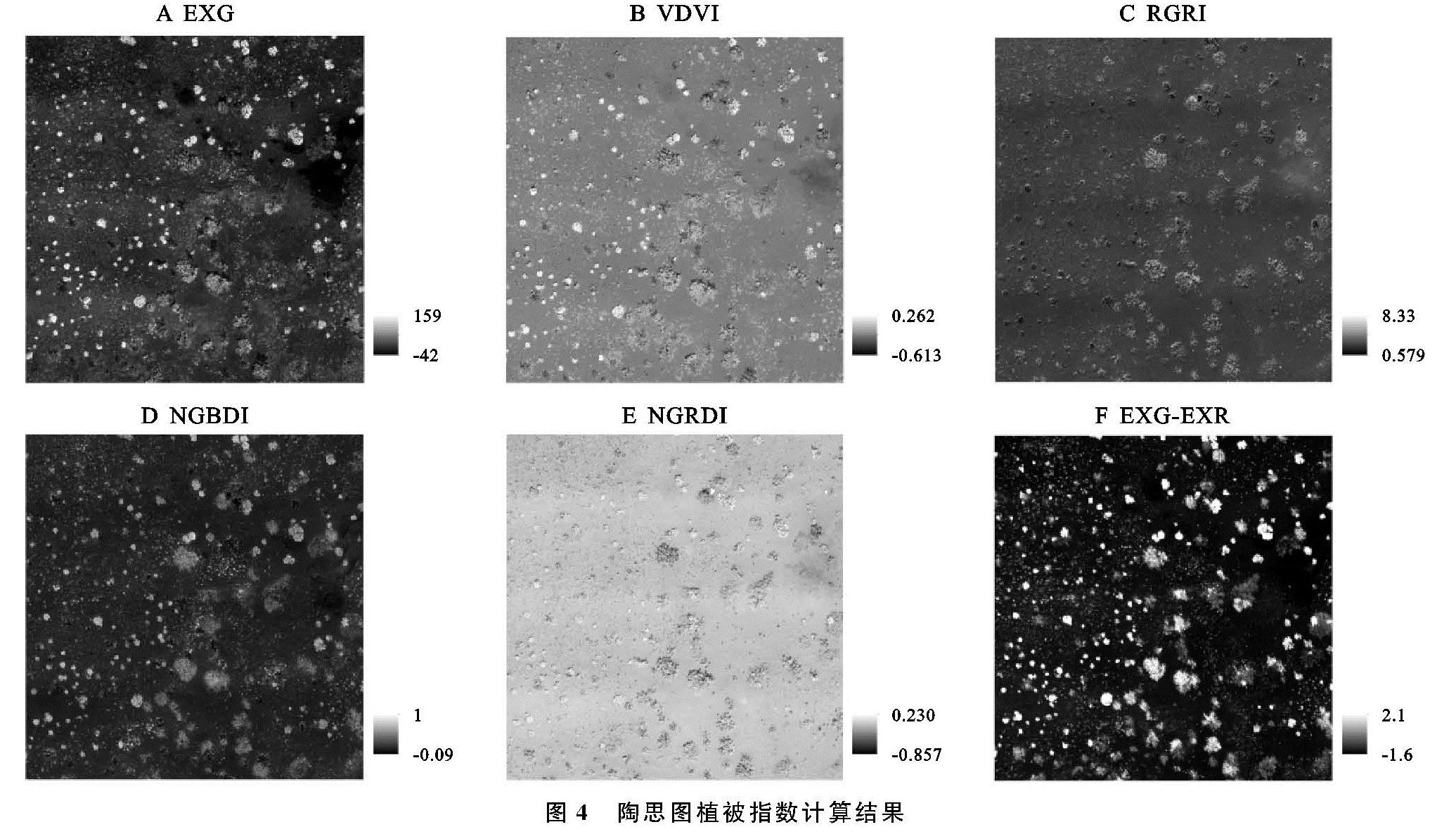
本研究中,当地物仅为灌木时,EXG和EXG-EXR指数出现双峰特征,NGBDI,NGRDI,RGRI,VDVI为非双峰特征。这同朱孟等[14]研究结果一致,当影像中地物仅为火龙果时,EXG,EXG-EXR指数有较明显双峰特征,NGRDI的灰度直方图双峰效果不明显; 当影像中存在多个类别地物时,如建筑物、农田、草地和裸土等,EXG表现出非双峰特征,VDVI,NGRDI,NGBDI,RGRI表现出较明显双峰特征[7,12,21],与本研究中相同指数的峰值特征相悖。此外,多位学者研究表明,VDVI指数经过提取后的灰度直方图有时不具有双峰特征的类似问题[20,33]。
4.2 植被提取精度的影响因素
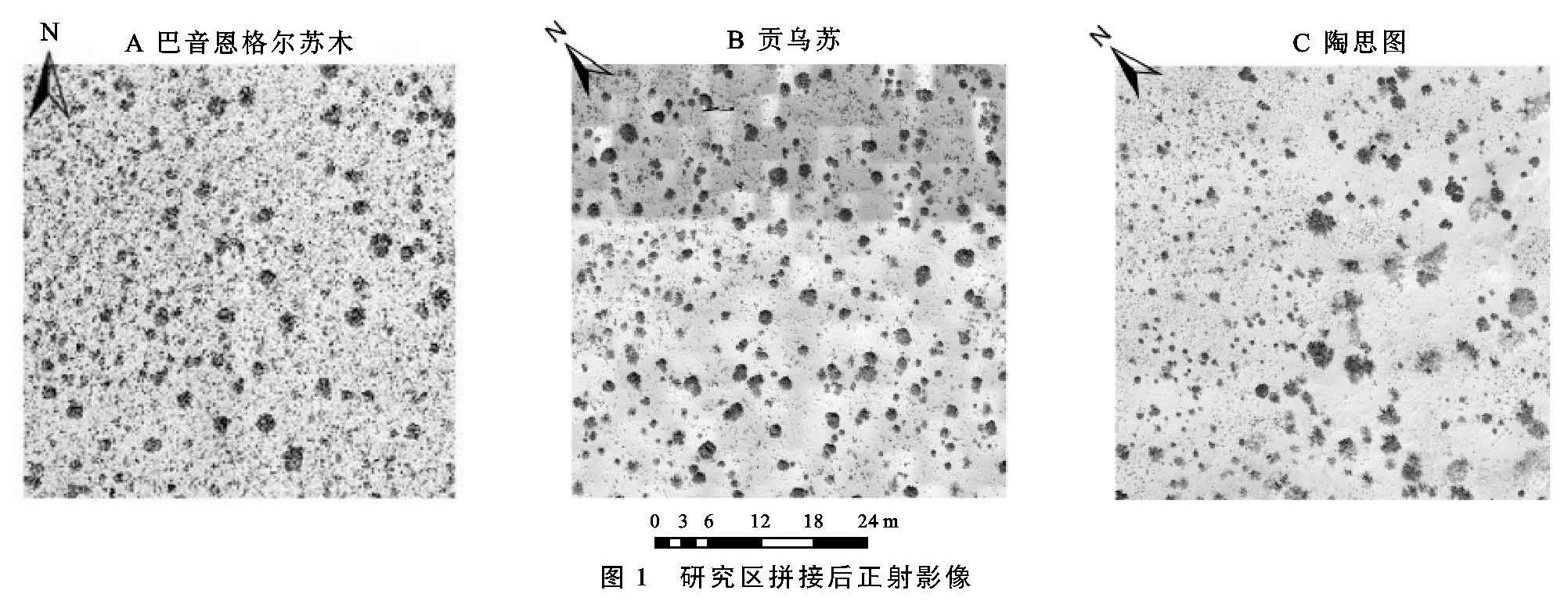
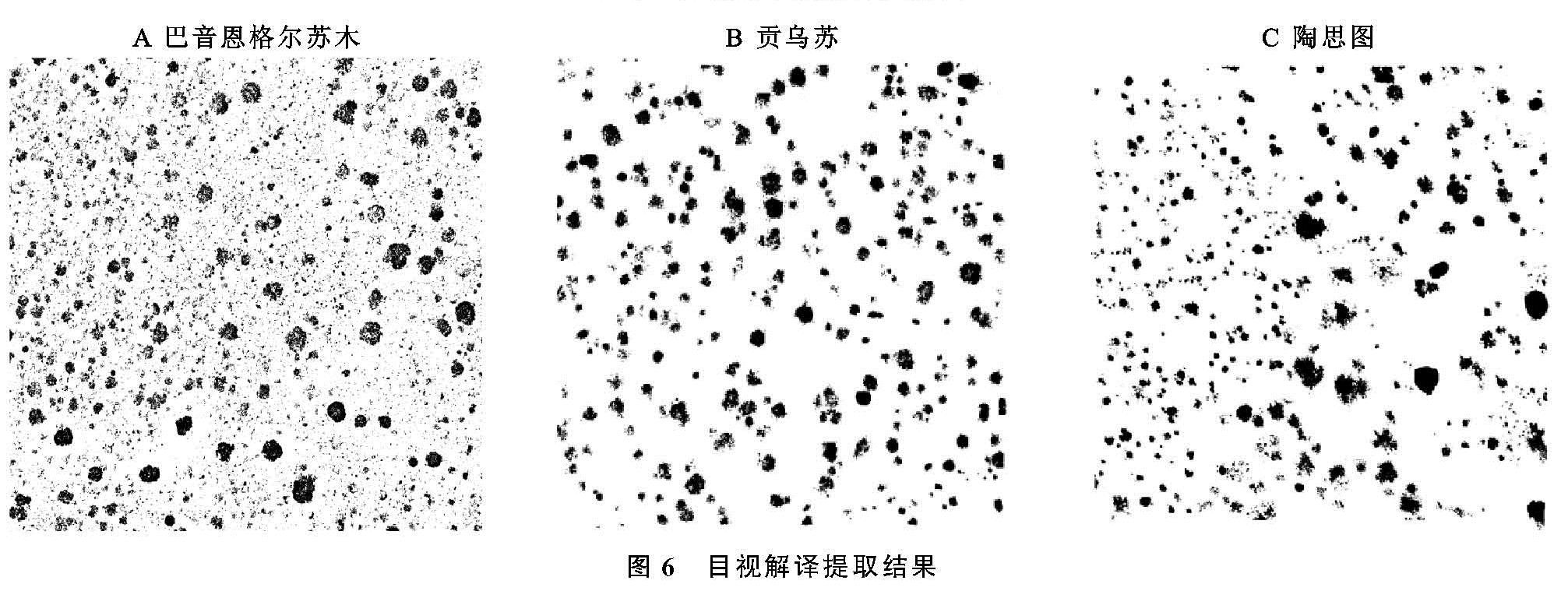
无人机在获取航拍影像时,受获取过程中光学透镜成像的不均匀性、大气衰减、云层、烟雾以及向阳、背阳等造成的光照条件不同等因素的影响[34],导致获取的影像存在不同区域不同程度亮度和色调等差异[35]。这些差异会不同程度地影响后续航拍图像和影像镶嵌质量的效果[36],进而导致图像之间的拼接和镶嵌结果出现明暗不均、色彩分布不协调[37],不同程度地影响航拍影像的特征提取、目标识别、分类、解译等。3个样地内,贡乌苏样地航拍影像出现影像色彩不均一现象,其中EXG指数提取精度受影像纹理影响严重,提取精度仅为64.88%; 在巴音恩格尔苏木和陶思图样地的提取精度为76.21%,77.03%,这同朱孟[14]、程俊毅[38]等研究结果相近。
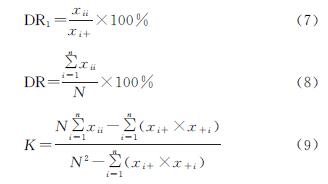
阈值可以被看成是目标地物与图像背景之间的分界线,它代表着一种分割准则。阈值选取的合理与否直接关系图像的分割效果与提取精度,因此如何选择分割阈值方法成为确定阈值的关键。目前常用分割阈值方法有直方图阈值法、OTSU算法和阈值迭代法,OTSU算法不需对直方图做预处理就能直接计算求得二值化阈值,但是无人机遥感影像分辨率高和数据信息量大,使用该方法得到的分割效果不太理想[39]。本研究中对出现双峰特征的植被指数,采用直方图阈值法确定阈值; 对于未出现双峰特征的植被指数,使用阈值迭代法确定阈值。结果表明,根据植被指数直方图特征选择相应的阈值计算方法可以合理确定阈值。
在可见光波段中,绿色植被在绿光通道反射率高,在红光、蓝光通道反射率低,因此通过绿光通道与红光、蓝光通道间的运算能够增强植被与周围地物的差异,方便后期更加精确地提取目标信息[40]。基于以上光谱原则,本文对6种指数提取精度分析,发现VDVI,EXG-EXR和NGBDI的植被提取效果高于其他指数,平均提取精度达80%以上,Kappa系数均大于0.7(K>0.61),表明以上指数植被提取结果与实际结果具有高度一致性,适合提取荒漠地区植被。该结果与众位学者在高原地区天然植被、矿山人工植被、城镇农田和天然植被地物提取精度相近[12,20-21]。
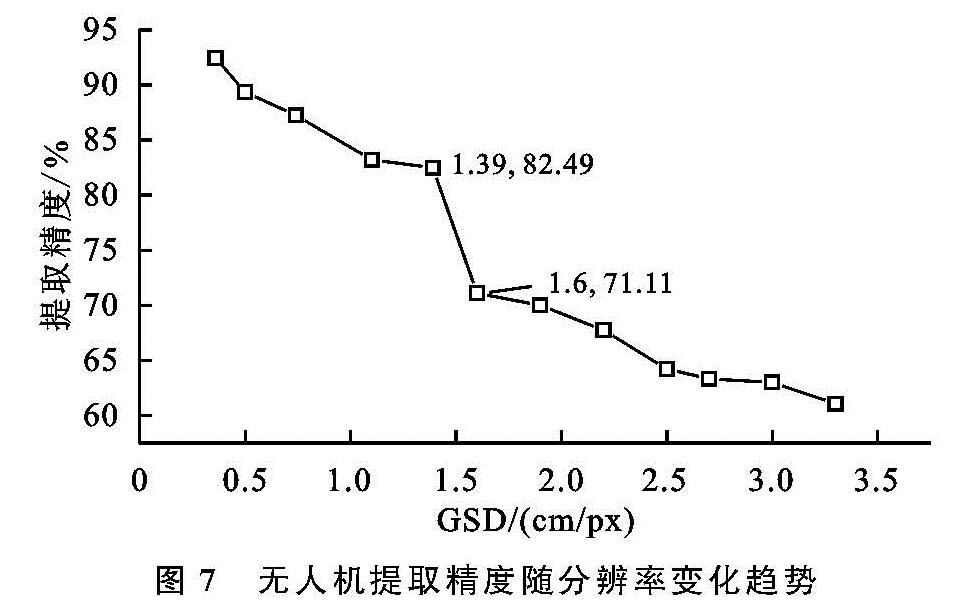
随着地面像素分辨率GSD降低,像元尺寸增大,其对应的位置精度逐渐降低,致使目标地物的边界锯齿化现象严重,甚至可能出现一定的位置偏差,进一步影响解译精度[41]。以VDVI指数为例,在0.36~1.39 cm/px的分辨率下,提取精度为97.45%~82.49%(图6),大于1.39 cm/px分辨率下的提取精度低于80%。这与Hsieh等[32]所得的结论一致,随着地面目标地物距航拍距离的减小,总体分类误差会减小,总体精度会增加。
4.3 无人机航拍最佳飞行高度
树冠平均高度的3倍飞行高度,可以最大限度地降低较高乔木和灌木阻挡间隙内影响植被特征的可能性[42]。荒漠灌木平均高度约3~6 m,10 m和20 m飞行高度满足荒漠野外调查飞行高度。而影像后期拼接处理过程中,10 m高度正射影像拼接出现斑块缺失; 20~30 m高度出现影像色彩明暗不均一,影响提取精度; 在60~120 m高度,影像分辨率降低,提取精度低于80%,不满足植被提取要求; 当飞行高度达到120 m时,无人机属于超视距飞行,存在空域问题。对野外植被调查而言,航拍耗电量、航拍高度、航拍时间以及数据的效果均是考虑的因素。Bipul等[43]用深度学习算法提取香蕉数量的研究中,飞行高度40 m和50 m的提取的正确率高达90%,建议作为野外调查优先选择的飞行高度,与本研究荒漠灌木在40 m和50 m航拍影像提取精度相近。综合以上因素,本研究认为40 m和50 m的飞行高度是野外调查的优先选择高度。